

Bu yazıda, PID Denetleyici ve onun tek istasyonlu bir cihazdan bugünkü haline dönüşmesinden bahsedeceğiz.
Endüstriyel proseslerde basit ON/OFF Kontrolörler yerine neden PID Kontrolörlerin kullanıldığını açıklayacağız.
Oransal, İntegral ve Türev olarak adlandırılan Denetleyici ayarlarının, kontrol altındaki farklı süreçleri nasıl etkilediğini göstereceğiz .
Ayrıca, Denetleyici Ayarı adı verilen çok önemli etkinliğe genel bir bakış sunacağız.
Basit Bir Örnek
Birçok insanın aşina olduğu ev sıcaklık kontrolü hakkında bir tartışma ile başlayalım.
Bu evde ısıyı her yere dağıtan bir fırın ve termostat adı verilen duvara monte edilmiş bir kontrol cihazı vardır.
Termostat, kümes sıcaklığını ölçen ve bu ölçümü ayarlanabilir bir ayar noktasıyla karşılaştıran bir sensöre sahiptir.

Oda sıcaklığı ayar noktasının altındaysa, fırın AÇIK konuma getirilir.
Oda sıcaklığı ayar noktasının üzerine çıktığında fırın KAPALI konuma geçer. Bu tür kontrole AÇIK/KAPALI veya Bang-Bang Kontrolü denir .

Aşağıda, fırın açılıp kapandığında oda sıcaklığının belirli bir süre boyunca ne yaptığının bir grafiği bulunmaktadır.
Gördüğünüz gibi , sıcaklık tam olarak 70°F ayar noktasında tutulmaz, ayar noktasının üstünde ve altında döngüler halinde tutulur.

AÇMA/KAPAMA kontrolü eviniz için uygun olabilir, ancak endüstriyel prosesler veya hareket kontrolü için uygun değildir.
Endüstriyel Bir Örnek
Nedenini açıklamak için bir tank seviye kontrolü örneğine bakalım. Valf, pompa boşaltırken tankı doldurur. Valf AÇIK/KAPALI kontrolü ile çalıştırılırsa, su %50 ayar noktası civarında dalgalanacaktır.

Amacımız için dalgalanmanın ±%10 olduğunu varsayalım. Çoğu endüstriyel uygulamada, ayar noktası etrafındaki bu dalgalanma kabul edilebilir değildir.
Peki ya vanayı kısmak ve AÇIK ile KAPALI arasında herhangi bir konuma getirmek mümkünse?
PID Denetleyicisi
Artık bir PID Denetleyici hakkında konuşmaya geçebiliriz. P Orantılı anlamına gelir, I İntegral anlamına gelir ve D Türev anlamına gelir.
Her işlem farklı yanıt verdiğinden, PID denetleyicisi değişen miktarlarda Oransal , İntegral ve Türev eylemi kullanarak düzeltmenin ne kadar ve ne kadar hızlı uygulanacağını belirler.
Her blok, denetleyici çıkış sinyalini oluşturmak için birbirine eklenen benzersiz bir sinyale katkıda bulunur.

Geri Besleme Kontrol Döngüsü
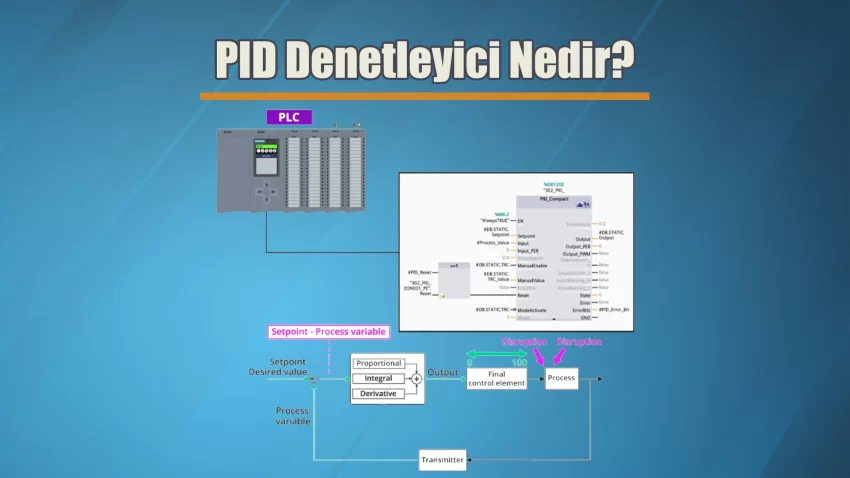
Bir PID Denetleyicisinin bir geri besleme kontrol döngüsüne nasıl uyduğuna bakalım. Denetleyici, Sürecin çeşitli kesintilere rağmen mümkün olduğunca istenen değere yakın kalmasını sağlamaktan sorumludur.
Denetleyici, Verici İşlem Değişkeni (PV) sinyalini ve Ayar Noktasını karşılaştırır.
Bu karşılaştırmaya bağlı olarak kontrolör, Son Kontrol Elemanını çalıştırmak için bir çıkış sinyali üretir. Bu PID Denetleyici çıkışı, Son Kontrol Elemanını %100 aralığının tamamında çalıştırabilir.

PID Denetleyici Mantık Bloğu
Çoğu modern PID Denetleyici, bir PLC veya DCS’nin parçasıdır ve blok komutları kullanılarak program kontrol mantığında oluşturulur.

Bağımsız PID Denetleyicisi
PLC’ler ortaya çıkmadan önce, bir PID denetleyicisi, bir döngüyü kontrol etmekten sorumlu bağımsız bir cihazdı.

PID Denetleyici Parametreleri
Bir kontrol odasında, bir panel üzerine monte edilmiş düzinelerce veya yüzlerce bağımsız kontrolör bulunur.
Günümüzde halen üretilmekte ve kullanılmakta olan birçok bağımsız PID denetleyicisi bulunmaktadır.
Tamam, geri dönelim ve PID denetleyicinin P , I ve D bileşenlerinin her birinin ne yaptığı hakkında konuşalım.
Daha önce PID Denetleyicisinin, çeşitli kesintilerden bağımsız olarak Sürecin ayar noktasına mümkün olduğunca yakın kalmasını sağlamaktan sorumlu olduğunu söylediğimizi hatırlayın.
Hata sinyali olarak Proses Değişkeni ile Ayar Noktası arasındaki farkı belirtelim.

1) Oransal Blok
Oransal blok , Hata Sinyalinin büyüklüğü ile orantılı bir çıkış sinyali oluşturur .

Ne yazık ki, ayar noktasına ne kadar yaklaşırsanız, o kadar az iter. Sonunda, süreç sürekli olarak ayar noktasına yakın çalışır, ancak tam olarak orada değildir.

İşte o zaman Integral devreye girer.
2) Entegre Blok
İntegral blok , Hata Sinyalinin süresi ve büyüklüğü ile orantılı bir çıkış oluşturur .
Hata ne kadar uzun ve miktar ne kadar büyükse, integral çıktı o kadar büyük olur.

Bir Hata olduğu sürece, Integral işlemi devam edecektir.

3) Türev Bloğu
Türev bloğu , hata sinyalinin değişim hızıyla orantılı bir çıkış sinyali oluşturur .
Hata ne kadar hızlı değişirse, türev çıktısı o kadar büyük olur.

Türev kontrol , gelecekte hatanın ne olacağını görmek için ileriye bakar ve buna göre kontrolör çıkışına katkıda bulunur. Bu bizi Controller Tuning adlı bir terime getiriyor .

Denetleyici Ayarı
Daha önce her işlemin farklı tepki verdiğini ve PID denetleyicisinin Oransal, İntegral ve Türev eylemini ayarlayarak düzeltmenin ne kadar ve ne kadar hızlı uygulanacağını belirlediğini söylemiştik .
Denetleyici Ayarı, belirli işlem gereksinimleri için denetleyici P , I ve D değerlerinin doğru şekilde ayarlanmasını içerir. İlginç bir şekilde, Denetleyici Ayarı ile elde edilen doğru ayarlar, belirli gereksinimler nedeniyle işlemler arasında büyük farklılıklar gösterebilir.

Örneğin, kontrolör ayarlandıktan sonra, bir tank seviye kontrolünde yüzde birlik bir ayar noktası artışı, çeyrek dalga sönümlemeli bir yanıt üretir.
Bu tür bir yanıt, tank seviyesindeki bir süreçte uygun olabilir, ancak hareket kontrol sürecinde felaket olabilir.

Denetleyici Ayarlama Yöntemleri
Bir denetleyiciyi ayarlamak için, denetleyici ayar noktası değişikliklerine neden olduktan sonra proses yanıtının gözlemlenmesini içeren birçok farklı manuel yöntem vardır.
Yöntemlerden biri, ayar noktası değişikliği miktarının artırılmasını ve işlem kararlı durum salınım durumuna girene kadar prosedürün tekrarlanmasını içerir.

Bu ayarlama yöntemi, yeterli sonuçlar verir, ancak çoğu uygulamada genellikle pratik değildir. Örneğin, büyük bir tanktaki sıvı seviyesini kararlı durum salınımına zorlamak ne kadar pratiktir?
Günümüzde satılan çoğu proses denetleyicisi, PLC ve DCS döngü denetleyicisi Otomatik Ayarlama özelliğine sahiptir.
PID denetleyicisi , sürecin ayar noktasındaki ve önerilen PID ayarlarındaki bir değişikliğe nasıl tepki verdiğini öğrenir .

İlk PID parametrelerinin manuel veya otomatik ayarlama yöntemlerinden türetilmiş olmasına bakılmaksızın, istenen yanıtı elde etmek için genellikle deneyimli otomasyon uzmanları tarafından ek ayarlamalar gerekir.

Özet
Yazı içeriğimizde neler öğrendik gözden geçirelim:
– Bir ON/OFF veya Bang-Bang kontrol cihazının yalnızca iki çıkış koşulu vardır ve bu iki koşul arasında aniden geçiş yapar.
– Bir PID Denetleyicide, P Orantılı anlamına gelir, I İntegral anlamına gelir ve D Türev anlamına gelir.
PID Denetleyici, Sürecin çeşitli kesintilerden bağımsız olarak istenen değere mümkün olduğunca yakın kalmasını sağlamaktan sorumludur.
– PID kontrolörü, değişen miktarlarda P, I ve D eylemi kullanarak düzeltmenin ne kadar ve ne kadar hızlı uygulanacağını belirler.
– Oransal blok, Hata Sinyalinin büyüklüğü ile orantılı bir çıkış sinyali oluşturur.
– İntegral blok, Hata Sinyalinin süresi ve büyüklüğü ile orantılı bir çıkış oluşturur.
– Türev bloğu, hata sinyalinin değişim hızıyla orantılı bir çıkış sinyali oluşturur.
– Denetleyici Ayarı, belirli işlem gereksinimleri için manuel veya otomatik olarak denetleyici P, I ve D değerlerinin doğru şekilde ayarlanmasını içerir.
PID Denetleyici veya PID Tuning hakkında herhangi bir sorunuz varsa , bunları aşağıdaki yorumlara ekleyin, size 24 saatten daha kısa sürede geri döneceğiz.
Bu bilgilerden bazılarını kullanabilecek bir arkadaşınız, müşteriniz veya meslektaşınız var mı? Lütfen bu makaleyi paylaşın.
PID Controller Explained
Oransal, İntegral ve Türev olarak adlandırılan PID Denetleyici ayarlarının, kontrol altındaki farklı süreçleri nasıl etkilediğini göstereceğiz .






